
さて、前回までで、「回転不変位相限定相関法」(RIPOC; Rotation Invariant Phase Only Correlation Method)の実装と検証を行ってきました。
検証に用いた2つの画像は、同一の画像から切り出したものであり、外部からの撹乱などの影響のない、いわば“きれいな”画像でした。精度よくシフト量とロール角が推定できるのは、ある意味当たり前といえば当たり前でした。
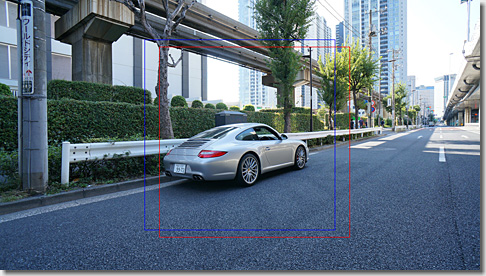
そこで、いよいよ、実際の画像に適用し、効果を検証してみます。

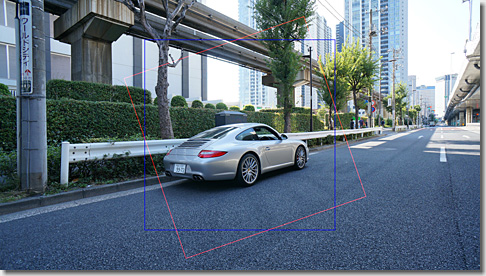
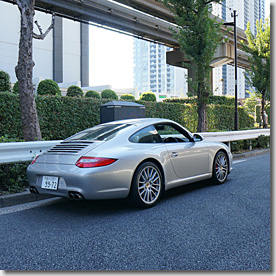
評価用に用いるのは、いつもの2つの左右画像。(1920×1080)

これを、端から1/4ずつ切り出し、照合します。(480×1080)
OpenCVでは、画像(配列)に対して着目領域(ROI; Region Of Interest)を設定できるため、取り扱いが非常に簡単です。
| 14 Related Entries | |
 【OpenCV】回転不変位相限定相関法による画像マッチング(1) | Next  【OpenCV】ステレオカメラからの画像入力(2) |
Posted by  SOARISTO at 22:11:46
|
Comment(1)
|
Trackback(0)
SOARISTO at 22:11:46
|
Comment(1)
|
Trackback(0)
Link URL: https://www.soaristo.org/blog/archives/2015/02/150228.php
SOARISTO at 22:11:46
|
Comment(1)
|
Trackback(0)Link URL: https://www.soaristo.org/blog/archives/2015/02/150228.php









{kind=link}