
前回の続きです。
これまでのプロセスを、動画にまとめてみました。
まだまだ遠い道のりですが、だんだんと形になってきました。0xF9C6
と、いうことで、今日も今日とて、切削です。
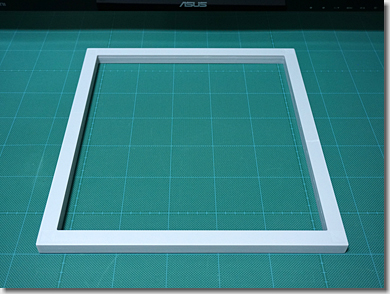
基台の台座です。
大きさは、301mm×335mmで、かなり大きめです。Snapmaker 2.0でも、モデルA350でないと、切り出せない大きさです。
基台との大きさの差は、四隅で2.5mmしかありません。
構造上、別に無くても構わないのですが、基台の下に台座があることで、基台の“風格”が違ってくる、と、勝手に思っています。0xF9C5
5mm厚のアクリル板を、3枚切り出し、アクリル専用の接着剤で融着しています。
見えにくいですが、裏面の四隅には、ゴム足を接着するための凹み(0.2mm)を付けてあります。

前々回に、オーディオインタフェースを追加したため、以前に作ったリヤパネルも、作り直しです。
こんな感じで、真ん中に、オーバルタイプのスピーカが填まります。
ACのインレットを、取り付けたところです。
熱収縮チュープは、通常のものより分厚いものを選び、絶縁しています。
ACアダプタを、取り付けたところです。
左側が、Dynamixelの「Robot Actuator」用のもので、右側が、nVIDIAの「Jetson TX2 Developer Kit」用のものです。
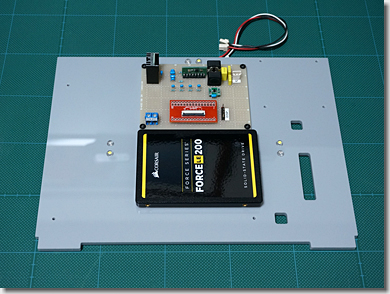
以前に作ったベースボードも、作り直しです。
裏面に、「Jetson TX2 Developer Kit」用のSSDと、オーディオインタフェースを取り付けています。あわせて、内部照明用の高輝度LEDも埋め込んであります。
つづいて、別の仕込み。

こちらは、5年4ヶ月前に購入してあった、「音量調節機能付きデジタル電波目覚まし時計」です。
絶対に起きられるよう、かなり大きめのベルが付いています。

本来の目的に使われることなく、いきなり分解されてしまうという、可愛そうな目覚まし時計。0xF9C7
欲しかったのは、この部分だけなのです。

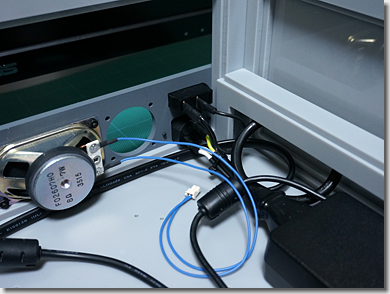
振り子を回転させるための小型モータには、マブチモーター(RE-140RA相当品)が使われていました。
念のため、電子機器保護用として、ノイズキラーコンデンサ(0.1uF)をハンダ付けしておきます。
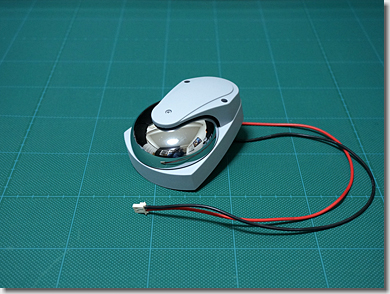
擬装用に、サーフェイサーを吹いて、マットグレーに仕上げておきます。
ベル本体ですが、よく見ると(よく見なくても)、ママチャリに付いているモノと共通のようです。
#どこかの町工場で作られているモノかも?
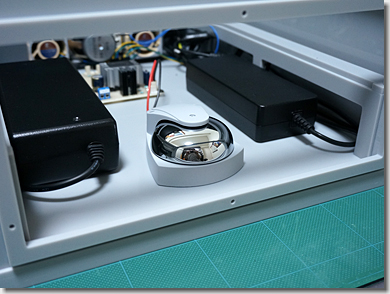
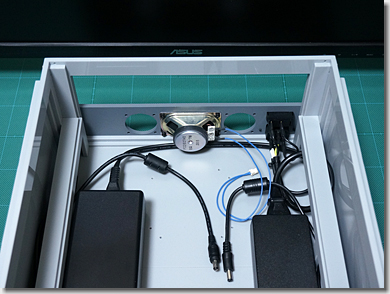
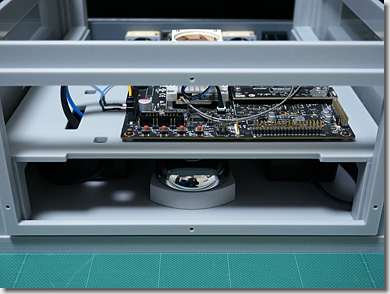
基台内部に、固定します。
ベル本体の直下には、四角い穴を開けてあります。これは、基台と台座との間にある空間を、共振スペースとして活かすためです。
裏面は、このような感じになっています。
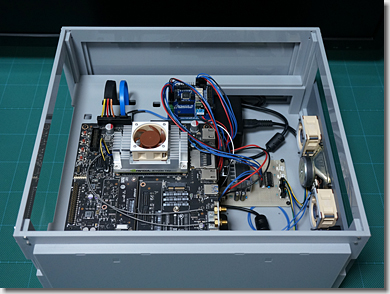
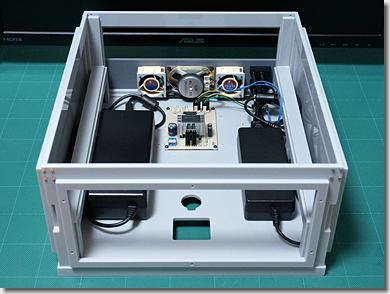
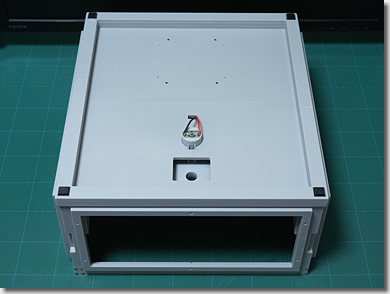
基台下部ができたところで、「Jetson TX2 Developer Kit」をはじめ、これまで作製した基板を、片っ端から実装します。

基台、後面から。

主電源スイッチ。
このロッカースイッチ、けっこうしっかりした操作感があって、良いです。
2つの大容量のACアダプタを開閉するため、接点容量が16A(125V AC)あるものを使っています。
う~ん、イイ感じになってきました。0xF9CF
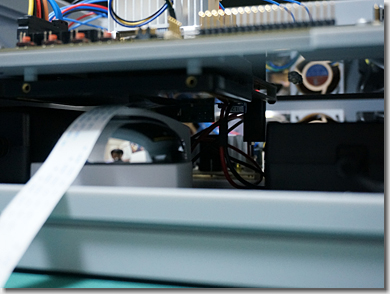
ベースボード裏面とのクリアランスは、ギリギリです。
(つづく)
| 30 Related Entries | |
 ペガソス計画(13) - 週刊「ファランクスを作る」 | Next  ペガソス計画(15) - 週刊「ファランクスを作る」 |
 SOARISTO at 21:02:48
|
Comment(0)
|
Trackback(0)
SOARISTO at 21:02:48
|
Comment(0)
|
Trackback(0)Link URL: https://www.soaristo.org/blog/archives/2021/07/210725.php
Post Comment