前回の続きです。
前回といっても、去年のハナシで、週刊どころか、月刊、いや季刊ぐらいのスパンですけれども・・・。0xF9C7
#まぁ、Audi R8をカイゾーしたり、車検に出したりとか、いろいろ、いろいろありましてね。
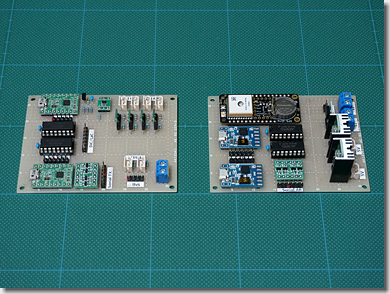
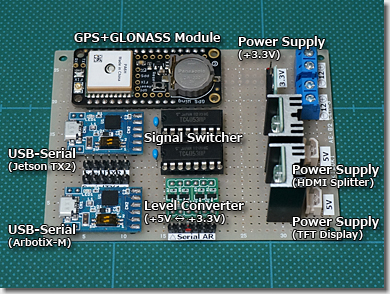
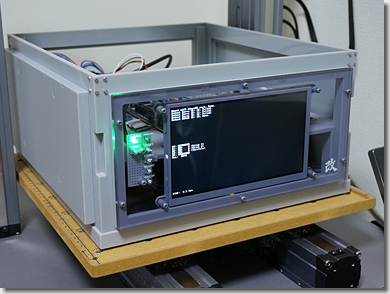
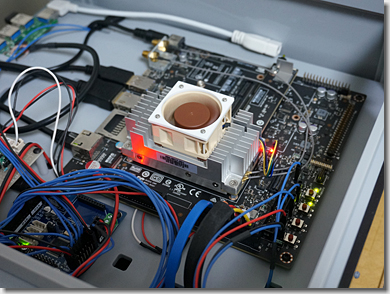
前回は、「タイニー・ファランクス」に、7.0インチのTFTディスプレイを取り付け、HDMIスプリッターで信号を分岐させました。
んが、以前に書いたとおり、HDMI経由のオーディオ出力は、信じられないぐらいノイズが乗った、ダメダメな音質でした。
#正確には、HDMIのオーディオ信号が悪いのではなく、TFTディスプレイの基板に載っている、デコーダー以降のオーディオ回路が、ダメダメな訳ですが。
と、いうことで、
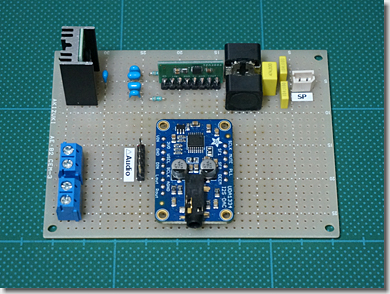
Jetson TX2用に、別途、オーディオ出力を用意することにしました。
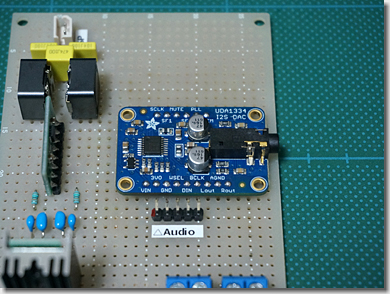
追加した回路は、こちら。
Adafruitの「I2S Stereo Decoder - UDA1334A Breakout」(6.95ドル)です。
続きを読む: ペガソス計画(22) - 週刊「ファランクスを作る」
| 30 Related Entries | |
 ペガソス計画(21) - 週刊「ファランクスを作る」 | Next  ペガソス計画(23) - 週刊「ファランクスを作る」 |
Posted by  SOARISTO at 21:48:48
|
Comment(0)
|
Trackback(0)
SOARISTO at 21:48:48
|
Comment(0)
|
Trackback(0)
Link URL: https://www.soaristo.org/blog/archives/2023/02/230218.php
SOARISTO at 21:48:48
|
Comment(0)
|
Trackback(0)Link URL: https://www.soaristo.org/blog/archives/2023/02/230218.php