なにやら、また設計してます。0xF9C7
以前に、今回の「CAN Scanner」のコントローラモジュールにしようとして、「PIC18Fファミリ」をご紹介しました。
「PIC18Fファミリ」は、10MHzのクロックを4逓倍して、内部40MHzで動作させることができますが、4クロック/1命令のため、実効的な処理能力としては、10MIPSとなります。
一方、「PIC24Fファミリ」では、8MHzのクロックを4逓倍して、内部32MHzでの動作となりますが、2クロック/1命令のため、処理能力は、16MIPSとなります。
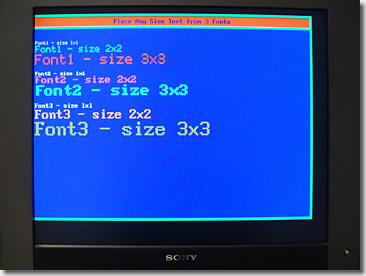
しかも、「PIC18Fファミリ」は8bitコアですが、「PIC24Fファミリ」は16bitコアであり、さらには16bitのハードウェア乗算器を内蔵しているため、今回の画像回転のような乗除算の多い処理を実行させるには、持ってこいです。
実際の自動車においても、ローカルな部分の制御には、8bitコアのモジュールが使われていますが、モジュール間の制御や自動車全体に関わる複雑な処理には、16bitコアや32bitコアのモジュールが使われています。
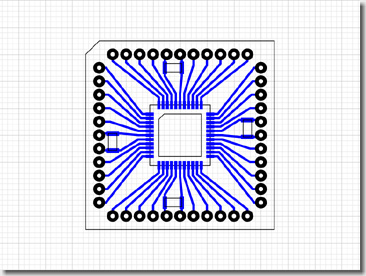
ということで、今回の「CAN Scanner」のコントローラモジュールには、16bitコアの「PIC24Fファミリ」を使うことにします。
| 17 Related Entries | |
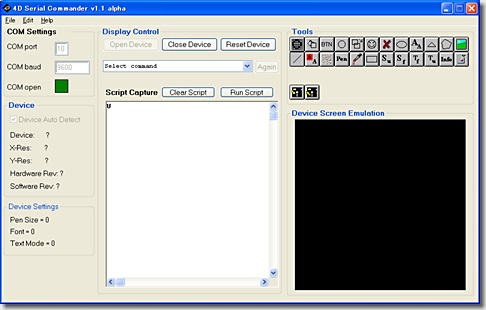
 4D Serial Commander | Next  PICkit 3 In-Circuit Debugger |
Posted by  SOARISTO at 23:36:52
|
Comment(0)
|
Trackback(0)
SOARISTO at 23:36:52
|
Comment(0)
|
Trackback(0)
Link URL: https://www.soaristo.org/blog/archives/2010/02/100226.php
SOARISTO at 23:36:52
|
Comment(0)
|
Trackback(0)Link URL: https://www.soaristo.org/blog/archives/2010/02/100226.php